
SKR E3 DIP V1.1
La SKR E3 DIP V1.1 tiene unas dimensiones de placa compatible con Ender 3 además de contar con drivers intercambiables lo que le da gran versatilidad y una placa perfecta como recambio de la original.

Recordamos que todas las placas de la gama E3 están especialmente diseñadas para el uso o reemplazo de la electrónica de una impresora Creality Ender 3 aunque puede ser usada en otras impresoras sin problema atendiendo al cableado y características específicas de cada una.
Si necesitas más información o ayuda no dudes a unirte al grupo de Telegram de SKR @SKR_board_32bits.
Os recordamos que tienes mas guias de ayuda en nuestro bot de Telegram @ThreeDWorkHelpBot

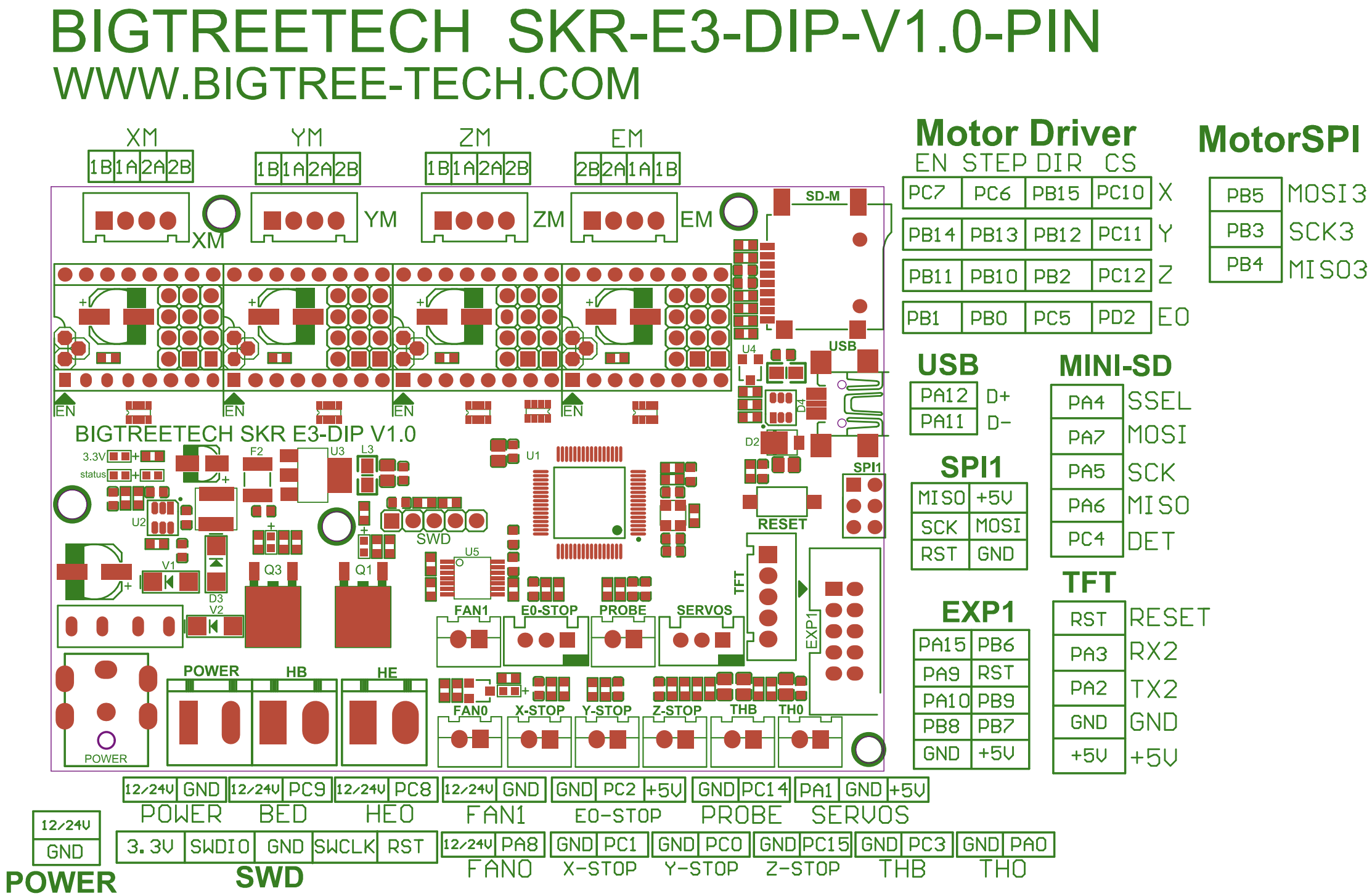
Diagramas SKR E3 DIP V1.1
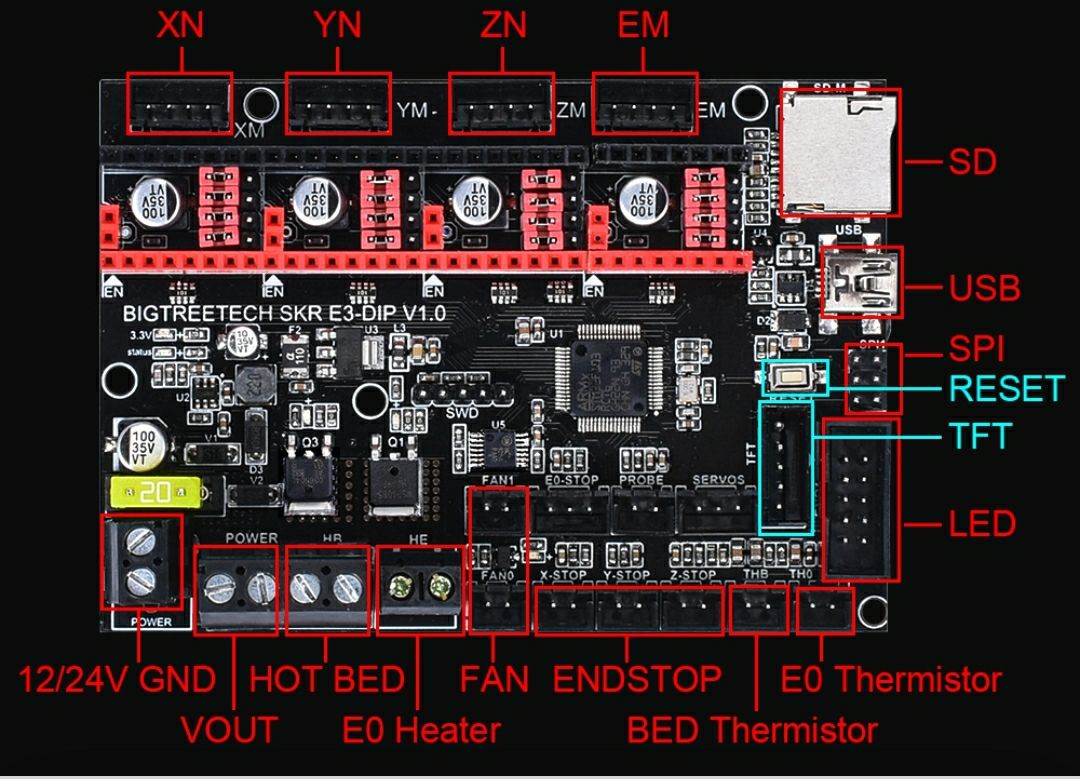
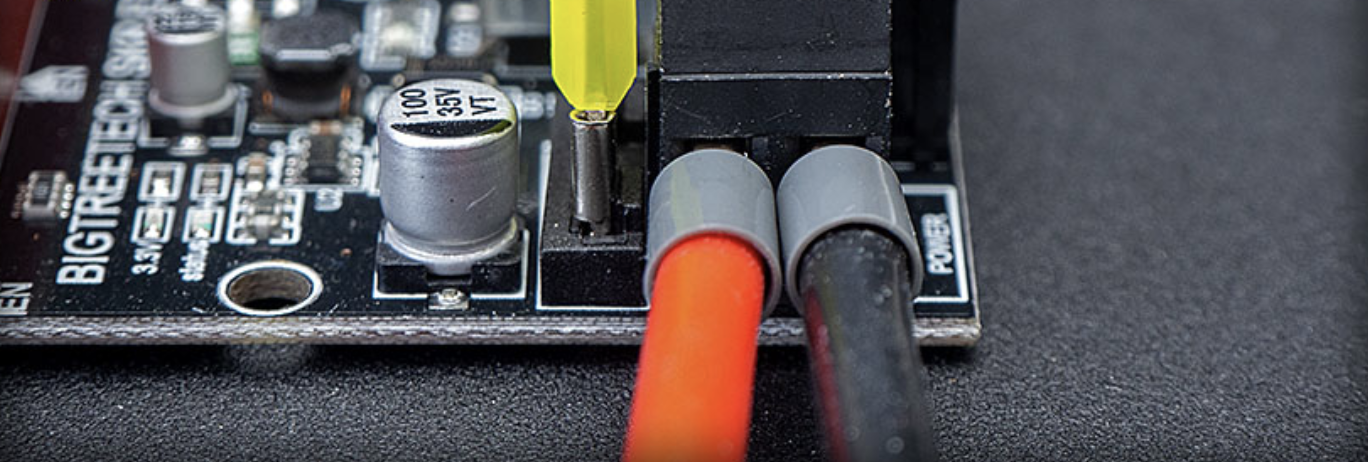
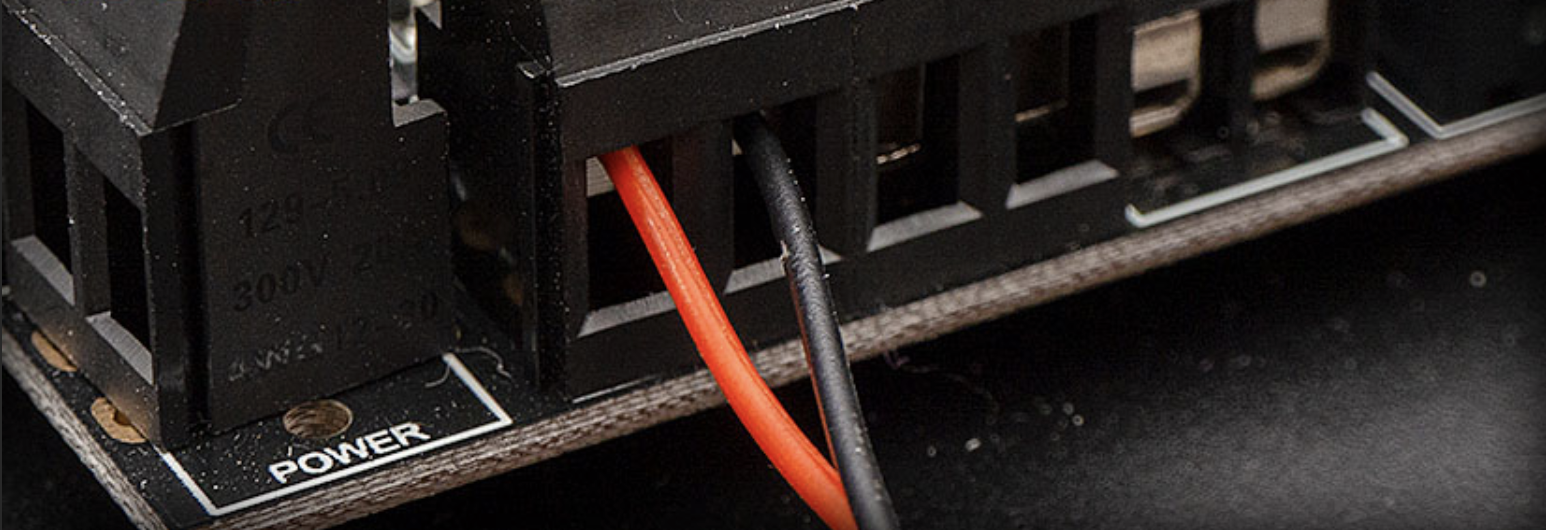
Conexiones de alimentación
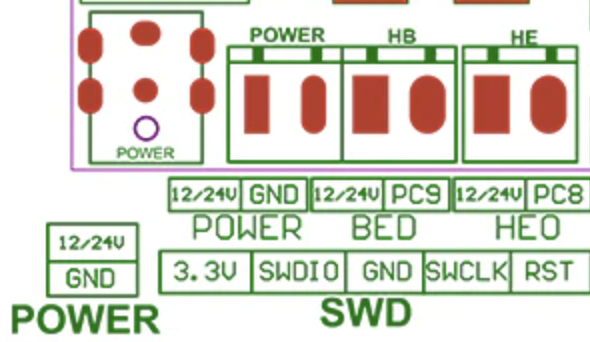
Como otras placas SKR Mini E3 el conector de alimentación se encuentra en la parte izquierda de la placa y acepta alimentación de 12v o 24v.Detalle del conector de alimentación de la placa
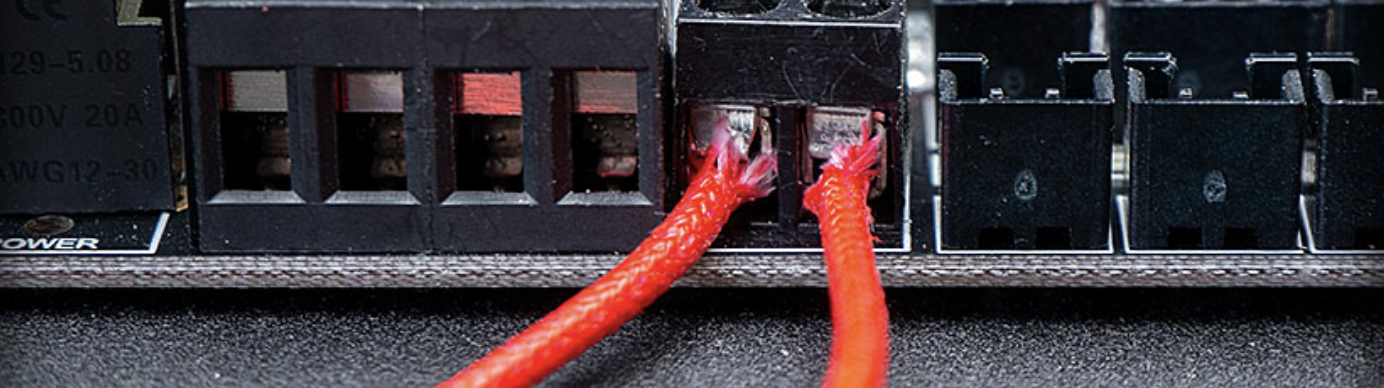
Conector cama caliente, es crítico fijarse en la polaridad del mismo si conectamos un MOSFET externo o una cama con polaridad en especial estos que disponen de un led incorporado.Conector alimentación cama caliente
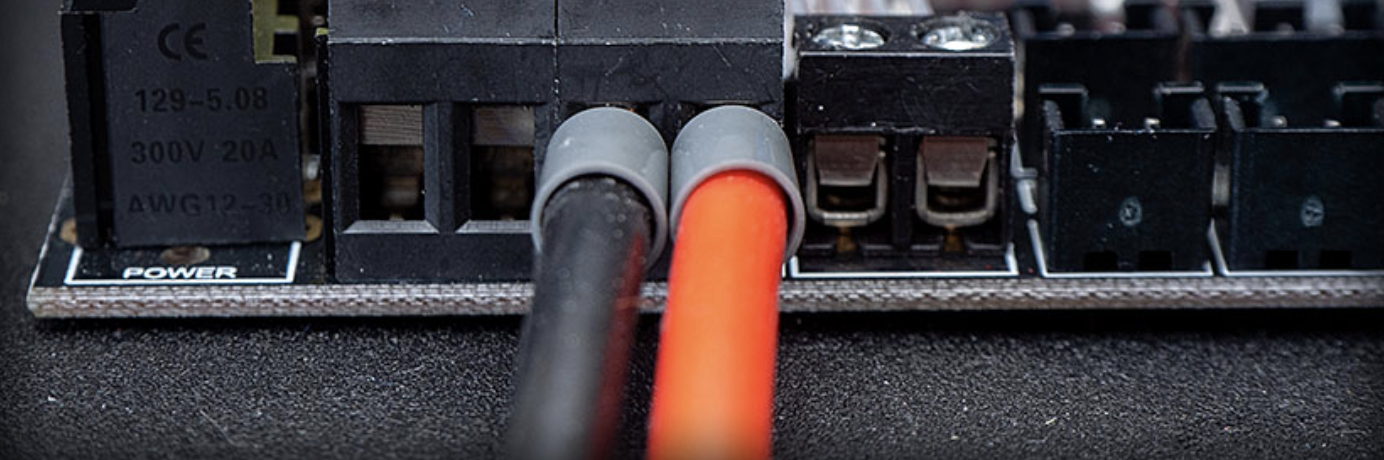
Calentador hotend, como en la cama caliente normalemente no es necesario fijarse en la polaridad por norma general ya que estos componentes no suelen tener polaridad.Conector hotend
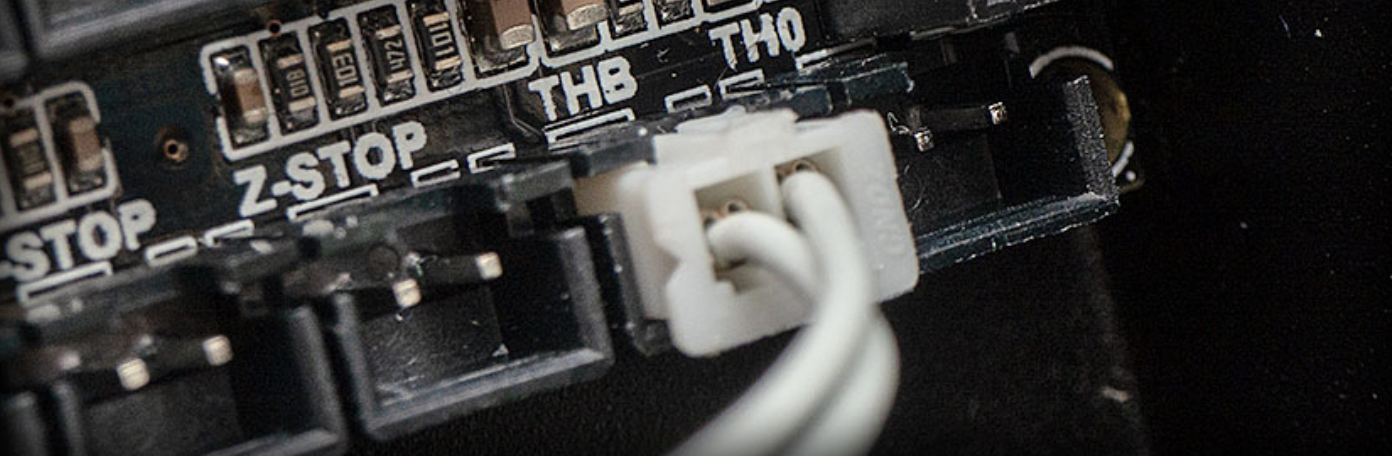
La orientación de los thermistores normalmente no es importante ya que estos no suelen tener polaridad. En este caso para esta placa contamos para un conector para la cama caliente (TB) y otro de hotend (TH0).
Es aconsejable usar conectores JST-XH 2.54mm como los de la siguiente imagen ya que evitan que se produzcan desconexiones y se minimizan los falsos contactos.
UART TMC-2208 & TMC-2209’s
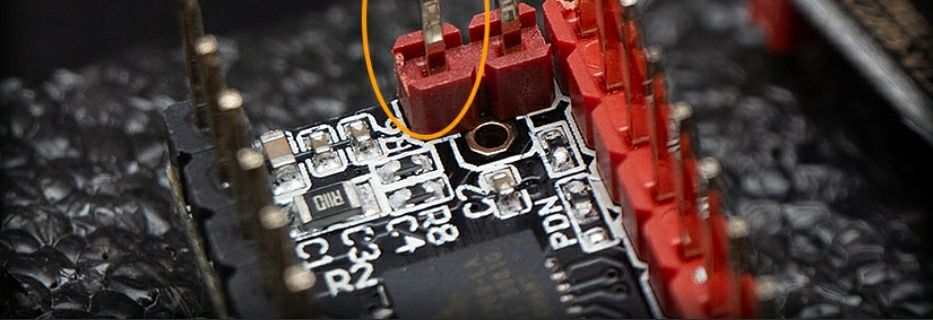
UART TMC2208 y TMC2209, al igual que sus hermanas mayores poner esros drivers wn wl modo avanzado llamado UART es muy sencillo. Basta con quitar todos los jumpers y dejar solo uno como en la siguiente captura.
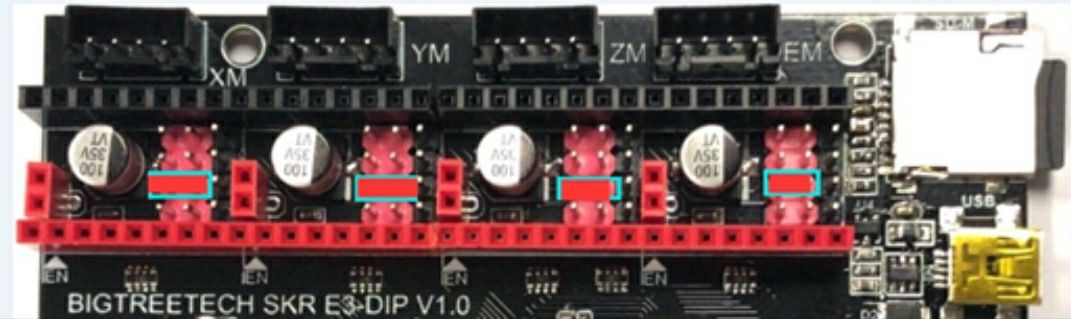
Es importante asegurarte que los drivers que instales estén preparados para trabajar en modo UART ya que algunos drivers necesitan una soldadura/puente para habilitarlo.
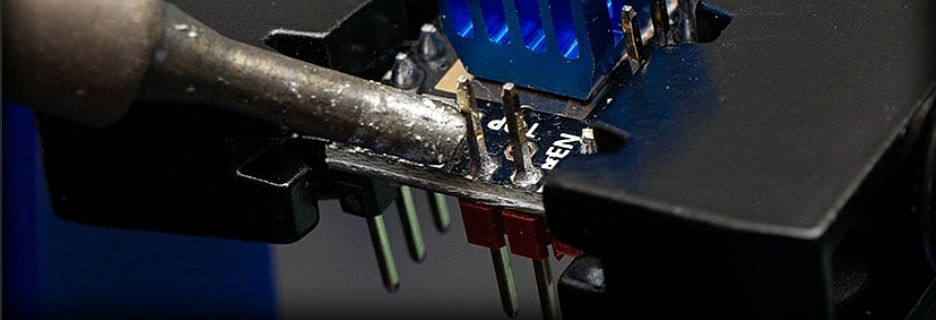
También recuerda que si vas a utilizar finales de carrera físicos con TMC2209 deberas cortar/doblar/desoldar el pin DIAG.
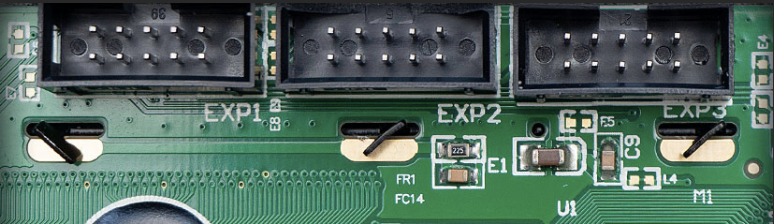
Conector LCD, al estar preparado para impresoras Ender 3 la placa cuenta con un solo conector de 10 pines para el LCD que irá conectado entre el EXP1 de la placa y el EXP3 del LCD.
En este aspecto esta placa estará limitado el número de pantallas compatibles a aquellas que usen conectores EXP3 o deberemos de modificar el fichero pins y/o realizar un adaptador para nuestro LCD no compatible.Conector EXP3 pantallas LCD Ender 3
Conector TFT, este tipo de pantallas normalmente táctiles son un "ente" externo a Marlin que es el sistema operativo que gestiona nuestra placa y se comunica con el mediante una conexión serial a través del conector TFT.
Las pantallas SKR están preparadas con el correcto orden en el cableado (RESET-RX-TX-GND-+5V) pero podemos usar cualquier otra pantalla serial prestando atención al pineado de la misma y el de nuestra placa para adaptarlo.Conexión TFTConexión TFT en pantalla SKR TFT35 E3


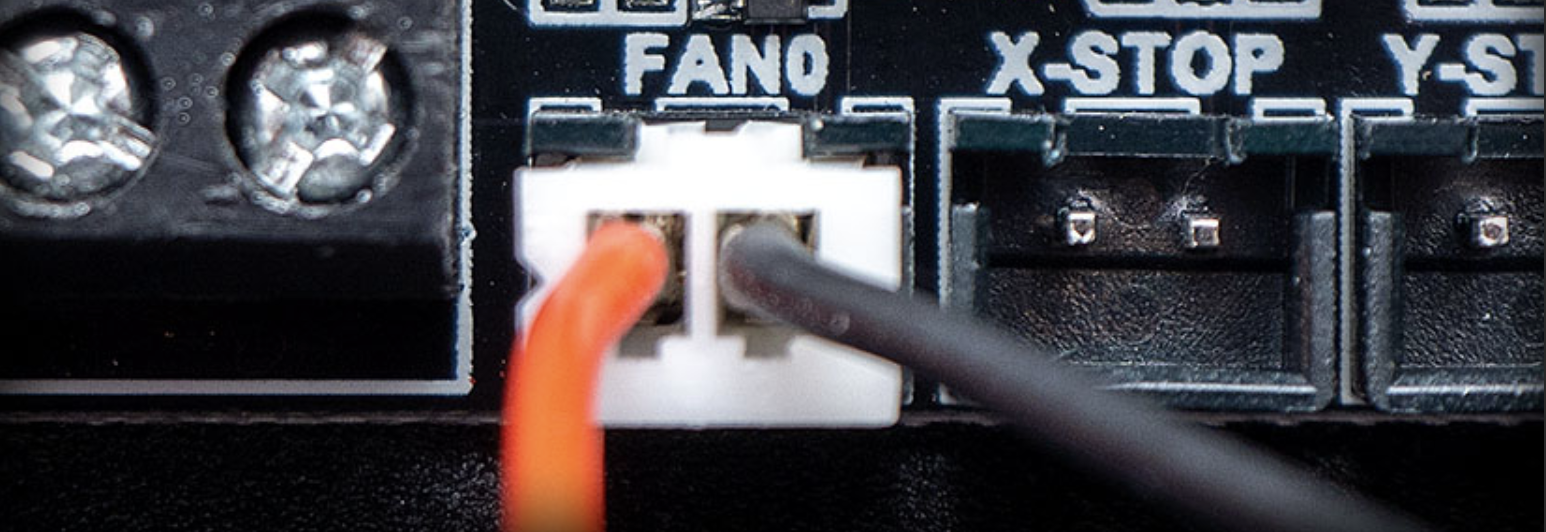
Ventiladores, en este caso contaremos con FAN0 que será la salida de ventilador de capa para el primer hotend y FAN1 por defecto está destinado para la refrigeración de la electrónica y drivers.
Recordar de nuevo que en este caso es muy muy importante la polaridad al conectar los ventiladores a la placa.Conector ventilador de capa (FAN0)Conector ventilador electrónica (FAN1)

También disponemos de otra salida de corriente para conectar ventiladores extra o cualquier otro dispositivo que necesitemos, recordando que este no es controlable como los anteriores y estarán constantemente recibiendo corriente.Salida extra de alimentación
Sensor de nivelación automática BLTouch o similares, esta placa cuenta con un conector dedicado para este tipo de sensor de nivelación de los más versátiles y fiables que podemos instalar hoy en día.Conector sensor BLTouch o similar

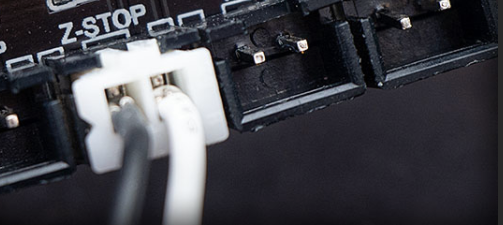
Dependiendo de la configuración que realicemos en Marlin la parte de final de carrera del sensor (cables negro y blanco normalmente) pueden ser instalados tanto en el puerto dedicado del Z-PROBE o en el final de carrera Z-STOP.Conexión alternativa del sensor de nivelación dependiendo de nuestra configuración de Marlin
Instalación del firmware
Como ya hemos comentado esta placa está por defecto pensada para usar en una Ender 3 y el firmware preinstalado acorde a esta máquina. Si es vuestro caso y no os queréis complicar compilando vuestra propia versión podréis obtener las últimas versiones actualizadas en el Github de BigtreeTech en el siguiente link
https://github.com/bigtreetech/BIGTREETECH-SKR-E3-DIP-V1.0/tree/master/Firmware
En la siguiente captura podéis ver los ficheros que podéis descargar para directamente ponerlo en la SD y actualizar.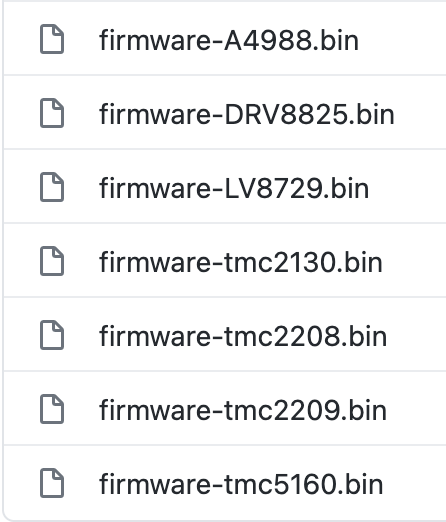
Estos firmwares preconfigurados a elegir dependiendo del driver que se instale en la placa.
Descarga el correspondiente a tu instalación y renombra de "firmware-[stepper driver].bin" a "firmware.bin".
Configuración de Marlin para SKR E3 DIP
Tal como comentábamos en el punto anterior os aconsejamos seguir nuestra guía para "cocinar" vuestro propio Marlin que tenemos en la seccion /Marlin de nuestro bot de ayuda en Telegram @ThreeDWorkHelpBot
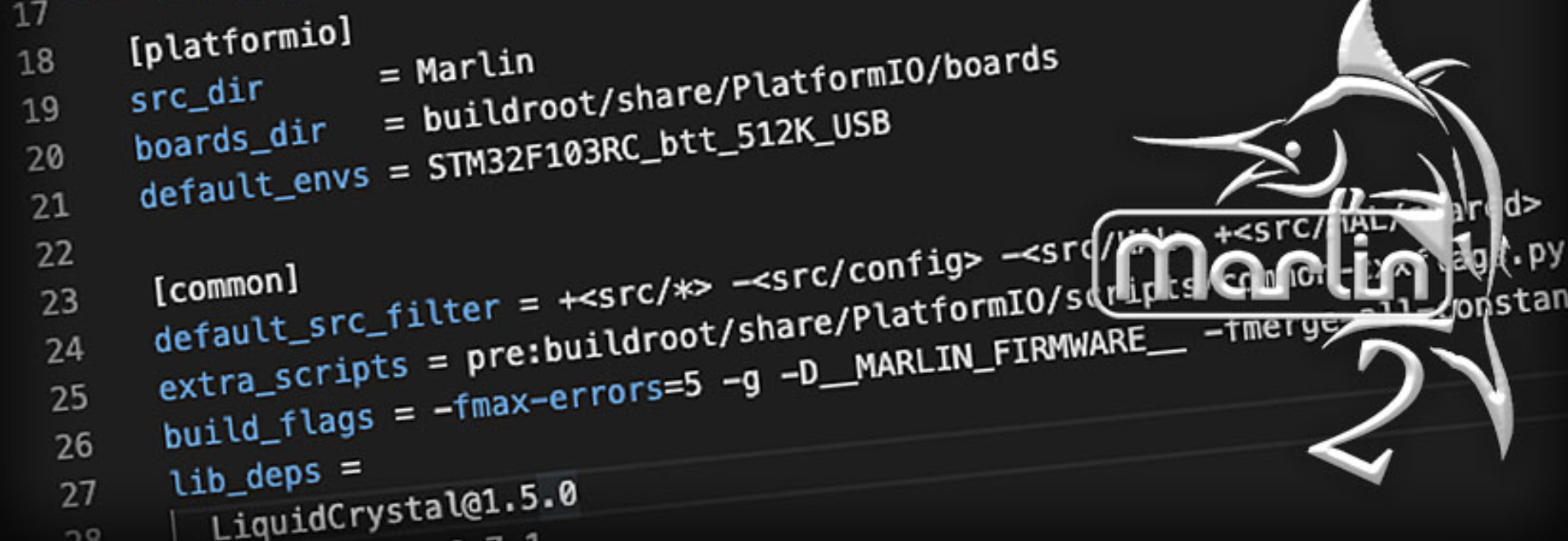
platformio.ini
En este fichero deberemos indicar el chipset que tiene nuestra placa por lo que deveremos buscar en el inicio del fichero el valor "env_default" y cambiarlo por el siguiente:
env_default = STM32F103RC_btt_512K_USB o en caso de tener problemas dado que algunas placas pueden ir con 512K o 256K se puede usar este default_envs = STM32F103RC_btt
configuration.h

Comenzaremos por configurar correctamente los SERIAL para esta máquina algo clave para el correcto funcionamiento de nuestra conexión TFT, USB o WIFI.
#define SERIAL_PORT 2 //TFT #define SERIAL_PORT_2 -1 //USB
BAUDRATE nos ayuda a definir la velocidad de la comunicación por el puerto SERIAL lo normal es usar 115200 o 250000.
#define BAUDRATE 115200
Ahora definiremos nuestro MOTHERBOARD el cual al igual que hicimos el platformio.ini nos indica el tipo de chipset que lleva nuestra placa y que permite a Marlin usar una configuración de pines u otra.
#define MOTHERBOARD BOARD_BTT_SKR_E3_DIP
Definiremos el tipo de filamento que usa nuestra impresora que básicamente indica el diámetro del mismo. Normalmente impresoras normales usan filamento del 1.75 aunque otra medida más o menos estándard es 3.
#define DEFAULT_NOMINAL_FILAMENT_DIA 1.75
Thermistores, en estas variables indicaremos que thermistores tenemos, os aconsejamos que identifiquéis cual es el vuestro o en su defecto uséis uno de valor 1 que suele ser el mas normal.
Es importatísimo indicar el tipo de thermistor correcto para que las medidas que Marlin recibe sean las correctas para evitar problemas de extrusión y/o fallos de lecturas.
En el caso que queramos desactivar o activar la cama caliente comentaremos o activaremos el thermistor de la cama, de esta forma Marlin sabe si tiene o no cama caliente.
En nuestro ejemplo y para esta placa usaremos un hotend y una cama caliente con un sensor de temperatura estándard.
#define TEMP_SENSOR_0 1 #define TEMP_SENSOR_BED 1
PID, otra parte muy importante es el PID del que podéis obtener más información detallada en la seccion /Calibracion/Calibracion Inicial de nuestro bot de ayuda en Telegram @ThreeDWorkHelpBot.
Básicamente el PID ayuda a que Marlin controle de forma adecuada la temperatura sin tener grandes fluctuaciones.
En nuestro caso habilitaremos la calibración de estos PID ya que dependen de muchas variables y los que vienen por defecto no siempre son la mejor opción, podéis obtener más información detallada en la seccion /Calibracion/Calibracion Inicial de nuestro bot de ayuda en Telegram @ThreeDWorkHelpBot para ver el proceso de calibración del PID.
#define PIDTEMP #define PIDTEMPBED
ENDSTOPS o finales de carrera, es importante verificar cuando realizamos un cambio de electrónica y encendemos por primera vez que la lógica de los finales de carrera es la correcta usando el comando M119 desde un terminal como Pronterface... esto es OPEN en estado normal y TRIGGERED cuando están pulsados.
En este ejemplo y dado que vamos a montar nuestra placa con BLTouch necesitaremos cambiar el endstop del probe para que se ajuste a este sensor. En todo caso podéis obtener más información detallada en la seccion /Nivelacion de nuestro bot de ayuda en Telegram @ThreeDWorkHelpBot teneis una guia dedicada a la instalación de este tipo de sensor de nivelación.
#define Z_MIN_PROBE_ENDSTOP_INVERTING true
Drivers, en nuestro ejemplo usaremos unos drivers TMC2209 en UART los cuales definiremos en Marlin de la siguiente forma:
#define X_DRIVER_TYPE TMC2209 #define Y_DRIVER_TYPE TMC2209 #define Z_DRIVER_TYPE TMC2209 //#define X2_DRIVER_TYPE TMC2209 //#define Y2_DRIVER_TYPE A4988 //#define Z2_DRIVER_TYPE A4988 //#define Z3_DRIVER_TYPE A4988 //#define Z4_DRIVER_TYPE A4988 #define E0_DRIVER_TYPE TMC2209 //#define E1_DRIVER_TYPE A4988 ...
STEPS o pasos de motor, tos valores indicaremos a Marlin los pasos de motor para realizar movimientos. En este ejemplo usaremos los que una impresora Ender lleva por defecto, en todo caso de nuevo os remitimos a la seccion /Calibracion/Calibracion Inicial de nuestro bot de ayuda en Telegram @ThreeDWorkHelpBot para ver el para calibrar estos pasos para nuestro extrusor y ejes de movimiento.
#define DEFAULT_AXIS_STEPS_PER_UNIT { 80.00, 80.00, 400.00, 93 } #pasos para Ender3 ejes X, Y, Z,Extrusor
S_CURVE_ACCELERATION, esta funcionalidad ofrece una gran mejora en la calidad de impresion ya que suaviza la aceleración o deceleracion cuando el cabezal de impresión está en movimiento.
Nota importate es que dependiendo de nuestra versión de Marlin y si usamos Linear Advance no son compatibles. En la seccion /Calibracion/Calibracion Inicial de nuestro bot de ayuda en Telegram @ThreeDWorkHelpBot podréis encontrar más información detallada de Linear Advanced.
#define S_CURVE_ACCELERATION
PROBE activando nuestro sensor de nivelación, aunque como ya hemos comentado hay una guía detallada de como instalar un sensor BLTouch vamos a realizar una revisión de las partes más importantes a tener en cuenta en el caso que querámos instalar un sensor de nivelación, algo muy aconsejable para asegurarnos que nuestras impresiones siempre tienen una primera capa lo más perfecta posible.
Comenzaremos por indicar donde está conectado nuestro sensor de nivelación, en este caso y el mas normal/aconsejable es conectarlo en el final de carrera de Z Z-STOP, también contamos con la opción de usar el puerto dedicado que cuenta la placa, en nuestro caso usaremos el Z-STOP para el ejemplo.
#define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN # indicamos a Marlin que nuestro sensor esta conectado en Z-STOP //#define Z_MIN_PROBE_PIN PC14 # comentamos esta linea al conectar el sensor en Z-STOP
Tipo de sensor BLTouch o Inductivo, existen diferentes tipos de sensores. Dependiendo del usado deberemos descomentar uno u otro.
En el caso de un sensor Inductivo: #define FIX_MOUNTED_PROBE En el caso de un sensor tipo BLTouch: #define BLTOUCH
Offsets del sensor, es muy importante decirle a Marlin donde se encuentra exactamente instalado nuestro sensor de nivelación... esto lo haremos definiendo los PROBE OFFSET.
El Offset es la distancia entre la punta del nozzle y la punta del sensor de nivelación que dependiendo de donde esté deberán ser valores positivos o negativos, puedes usar el siguiente gráfico como ejemplo de que valor poner en cada caso.
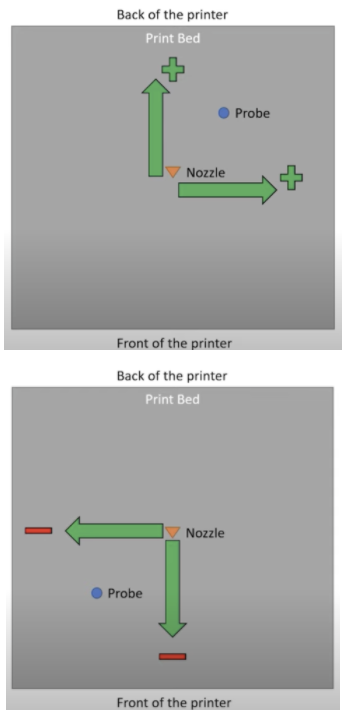
En nuestro caso y como ejemplo nuestro sensor esta desplazado hacia la izquierda del nozzle en X 30mm y 10mm en Y ya que está esa distancia hacia el fondo de la impresora.
#define NOZZLE_TO_PROBE_OFFSET { -30, 10, 0 }
PROBING_MARGIN (en versiones anteriores MIN_PROBE_EDGE), es muy normal que tengamos en nuestras impresoras un cristal como base de impresión aunque personalmente nos gustan más las láminas PEI magnéticas que aunque ser un poco mas susceptibles a marcarse con golpes tienen una excelente adherencia, no te limita el tamaño de la cama y retirar las piezas es extremadamente sencillo y rápido.
En cualquier caso ya tengamos cristal u otra superficie es aconsejable que el sensor este alejado de cualquier objeto que pueda molestarle durante el proceso de nivelación, ya sean grapas para fijar el cristal o el propio desajuste del inicio y final de cama que haga que el sensor nopueda medir.
Para esto usaremos este PROBING_MARGIN en el cual le diremos cuantos mm se tiene que alejar de los bordes de la cama.
En nuestro caso usando un BLtouch y una plataforma PEI lo dejámos por defecto.
#define PROBING_MARGIN 10
Dirección de motores, otro problema muy común a la hora de poner en marcha una impresora es que el cableado de las bobinas de nuestros motores no coincidan y se pueden dar dos casos:
1) que estén mezclados los conectores de nuestras bobinas, es muy fácil de identificar ya que el motor no girará correctamente e irá a trompicones. Para solucionarlo es aconsejable revisar el pinout de la antigua placa y/o del motor y compararlo con el de nuestra nueva placa para asegurarnos que coinciden
2) que el motor gire en la dirección incorrecta. En este caso de nuevo tenemos dos opciones... la primera y aconsejable es la de modificar en Marlin el giro del motor y la segunda es la de invertir el cableado de una de las bobinas del motor
En nuestro caso optamos por la primera modificando las siguientes lineas en Marlin cambiando el valor actual por el contrario... en este caso invertimos el eje Z.
#define INVERT_X_DIR true #define INVERT_Y_DIR true #define INVERT_Z_DIR false
Tamaño de impresión, si hemos usado un Marlin genérico es importante verificar que las dimensiones de impresión son las correctas para nuestra máquina.
Para el tamaño de cama en el ejemplo usamos una Ender 3 a su máximo tamaño, es aconsejable verificar que puedes llegar físicamente a estas medidas y ajustarlo de ser necesario:
#define X_BED_SIZE 235 #define Y_BED_SIZE 235
También definiremos el tamaño de nuestro eje Z:
#define Z_MAX_POS 250
Sensor de filamentos, te aconsejamos revisar en la seccion /Mejoras/Sensor de filamentos de nuestro bot de ayuda en Telegram @ThreeDWorkHelpBot podréis encontrar más información detallada acerca de como instalar y configurar un sensor de filamentos.
#define FILAMENT_RUNOUT_SENSOR
Autonivelación, tal como os comentábamos anteriormente en la sección /Nivelacion de nuestro bot tenés más información detallade de como activar autonivelación UBL (la más avanzada y aconsejable para camas de cierto tamaño o con problemas) y MESH que permite tener una malla sin sensor haciendo el proceso manualmente.
En todo caso para este ejemplo habilitaremos BILINEAR.
#define AUTO_BED_LEVELING_BILINEAR
Es importante decirle a Marlin que habilite la autonivelación (G29) después de un homing (G28).
#define RESTORE_LEVELING_AFTER_G28
En el caso de BILINEAR le diremos los puntos a realizar por malla en la siguiente parte de Marlin (por defecto lleva 3 puntos por eje, 3x3=9 puntos de comprobación).
if EITHER(AUTO_BED_LEVELING_LINEAR, AUTO_BED_LEVELING_BILINEAR) // Set the number of grid points per dimension. #define GRID_MAX_POINTS_X 3
Otra función que por seguridad debemos de habilitar es la de que realice un homing en el centro de la cama, esto nos ayuda a dos cosas... la primera a asegurar que el sensor tiene una superficie donde detectar el final de carrera y el segundo verificar visualmente que nuestros Offsets están de forma correcta ya que el sensor de nivelación tiene que quedar perfectamente posicionado en el centro de nuestra cama.
#define Z_SAFE_HOMING
EEPROM, una de las mejoras de esta placa vs su hermana menor es que incluye una EEPROM dedicada y estos valores no los guarda en la memoria del procesados permitiéndonos tener más funciones de Marlin activadas.
#define EEPROM_SETTINGS #define EEPROM_CHITCHAT
Nozzle Park, en el ejemplo que estamos explicando hemos añadido un sensor de filamentos. Para que este funcione deberemos activar NOZZLE_PARK_FEATURE que básicamente nos permite "aparcar" el cabezal de impresión en una zona segura para realizar este cambio de filamentos.
#define NOZZLE_PARK_FEATURE
SD, si queremos que nuestro Marlin pueda leer de nuestra SD ya sea el de la placa o en una pantalla que sea compatible (ojo que las Touch no lo son) deberemos activar el soporte de SD.
#define SDSUPPORT
Menu Homing, no es necesario pero si muy aconsejable en el caso de tealizar tests habilitar esta función que nos permite poder realizar un homing por separado de cada eje.
#define INDIVIDUAL_AXIS_HOMING_MENU
LCD, or recordamos que estas placas están destinadas a su uso en Ender 3 por lo que su compatibilidad con pantallas LCD es limitada y sería necesario hacer adaptadores y cambios en Marlin para el uso de otras pantallas.
#define CR10_STOCKDISPLAY
En el caso de ser una Ender 3 v2 deberemos habilitar una diferente aunque a tener en cuenta que esta pantalla es una pantalla serial y deberiamos conectarla al puerto TFT.
#define DWIN_CREALITY_LCD
configuration_adv.h
Ya hemos finalizado la primera parte y ahora tendremos que pasar a la configuración de las opciones avanzadas.
Scroll y nombres ficheros largos, es interesante activar esta función para poder mostrar el nombre completo de los ficheros a imprimir.
Al igual que el anterior y para que funcione correctamente tenemos que activar la siguiente opción.
#define LONG_FILENAME_HOST_SUPPORT #define SCROLL_LONG_FILENAMES
Conexión SD, en configuration.h habilitamos el soporte para SD y en configuration_adv.h definiremos de donde Marlin intentará usar esa SD.
Disponemos de tres opciones, LCD donde usaremos la de la pantalla Marlin... ONBOARD donde usaremos la de la placa y CUSTOM_CABLE donde le indicaremos que usamos un lector externo conectado a la placa
Tal como comentamos previamente no todas las pantallas que dispongan de SD van a funcionar correctamente.
En nuestro caso usaremos la de la placa.
#define SDCARD_CONNECTION ONBOARD
Babystepping, una función casi imprescindible tener es baby stepping. Babystepping nos permite ajustar la altura de Z durante una impresión para ajustar de forma manual esta altura a nuestro gusto.
En nuestro ejemplo habilitaremos que se pueda activar con un doble click en el botón/encoder, que siempre este disponible y nos muestre mejoras gráficas en el ajuste para entender la dirección del ajuste desde la pantalla.
#define BABYSTEPPING #define DOUBLECLICK_FOR_Z_BABYSTEPPING #define BABYSTEP_ALWAYS_AVAILABLE #define BABYSTEP_ZPROBE_GFX_OVERLAY
Reintentos en caso de fallo en la nivelación, otra función muy útil es la de poder reintentar el proceso de homing en caso de fallo. En ocasiones nuestro sensor de nivelación puede tener un fallo puntual y mediante esta función nos permitirá volver a intentarlo un número finito de veces.
#define G29_RETRY_AND_RECOVER #define G29_MAX_RETRIES 4
Pausado avanzado, tal como comentamos anteriormente en este ejemplo usamos un sensor de filamentos. Para que funcione correctamente tenemos que habilitar ADVANCED_PAUSE_FEATURE que habilita el comando gcode M600 para el cambio de filamentos.
Esto puedes hacerlo con o sin sensor de nivelación y requiere NOZZLE PARK para su correcto funcionamiento.
No entraremos en la configuración detallada ya que la tienes dentro de /Mejoras/Sensor Filamentos dentro de nuestro bot.
#define ADVANCED_PAUSE_FEATURE
Configuración drivers TMC2209 UART, para este ejemplo de configuración usaremos unos TMC2209 en UART y tenemos que configurar correctamente los parametros avanzados que encontraremos en la sección HAS_TRINAMIC_CONFIG de configuration_adv.h
Micropasos, aunque podemos configurar desde 16 a 256 micropasos no os aconsejamos para nada usar otro valor diferente al de 16. Con esos micropasos la definición que podríamos alcanzar mecánicamente es prácticamente imposible de alcanzar con impresoras normales además de que los drivers TMC2209 ya realizan ellos mismo la interpolación de estos para siempre ofrecer la máxima fiabilidad y precisión.
Hablando de fiabilidad es otro aspecto importante a la hora de los micropasos, los motores de pasos que llevan nuestras impresoras pierden torque (y pasos) a altas revoluciones así que aumentar esta definición de pasos aumentará exponencialmente el porcentaje de fiabilidad y por lo tanto que nuestras piezas no salgan correctamente.
En el ejemplo siguiente podremos ver como tenemos 16 micropasos para nuestro eje X.
#if AXIS_IS_TMC(X) #define X_CURRENT 650 // (mA) RMS current #define X_CURRENT_HOME X_CURRENT #define X_MICROSTEPS 16 // 0..256 #define X_RSENSE 0.11 #define X_CHAIN_POS -1 #endif
Otro valor importante de los valores anteriores es el de CURRENT donde ajustaremos la corriente de nuestros motores. También puedes ajustarlos desde el LCD desde Configuración/Avanzado/TMC junto con otras opciones que explicaremos a continuación.
STEALTHCHOP, es importante habilitarlo si queremos que nuestros motores sean "silenciosos" ya que si no estarán funcionando en modo SpreadCycle que es el modo pontencia.
#define STEALTHCHOP_XY #define STEALTHCHOP_Z #define STEALTHCHOP_E
Aunque es raro algunos extrusores pueden trabajar mejor con el modo StealthChop desabilitado. Si es nuestro caso comentaremos la siguiente linea.
//#define STEALTHCHOP_E
CHOPPER TIMMING, es usado por StealthChop para la sincronización de señales a los motores. Este tiene que coincidir con el voltaje usado en nuestra impresora, en el caso de Ender 3 y normalemente en todas las impresoras a 24v.
#define CHOPPER_TIMING CHOPPER_DEFAULT_24V
Monitor Status, esta función nos permite que Marlin pueda controlar en detalle todos los parámetros de los drives para poder ajustar por ejemplo la temperatura de los mismos para evitar problemas más graves.
#define MONITOR_DRIVER_STATUS
Hybrid Thresold, otra interesante función es Hybrid Thresold que nos permite que Marlin cambie entre StealthChop (silencio) o SpreadCycle (potencia) dinámicamente en base a la velocidad de movimientos.
#define HYBRID_THRESHOLD #define X_HYBRID_THRESHOLD 100 // [mm/s] #define Y_HYBRID_THRESHOLD 100 #define Z_HYBRID_THRESHOLD 15
En nuestro caso usamos los valores indicados para una Ender que son 100mm/s para X Y y de 15 para Z aunque lo podemos ajustar a nuestras necesidades.
TMC Debug, en este caso es un requerimiento de MONITOR_DRIVER_STATUS que deberemos de habilitar.
#define TMC_DEBUG
Fichero pins SKR E3 DIP
Al igual que otras placas SKR sus pines se definen con dependencias, a continuación tienes los ficheros pins que contienen las referencias para esta placa.
Marlin/src/pins/stm32f1/pins_BTT_SKR_E3_DIP.h
Pues ya hemos terminado!!! ahora solamente queda compilar, ajustar cualquier error que nos reporte el compilado y meterlo en nuestra placa!!!
Como siempre os aconsejamos verificar inicialemente la impresora de la siguiente manera:
revisar los finales de carrera siempre que sea posible usando un terminal (Pronterface por ejemplo) con el comando M119
revisar individualmente el homing de cada uno de los ejes de movimiento en el siguiente orden X Y Z E y en caso necesario invertir el giro del motor
revisar que nuestros thermistores reportan correctamente la temperatura
revisar que nuestros calentadores de cama y de hotend funcionan correctamente
realizar la guia de Calibración Inicial que podéis encontrar en nuestro bot en el apartado /Calibracion
Links de interés